A development toolkit based on the PX4 flight controller simplifies development efforts for all UAV platforms, including land rovers, multicopter, fixed-wing and submersible vehicles.
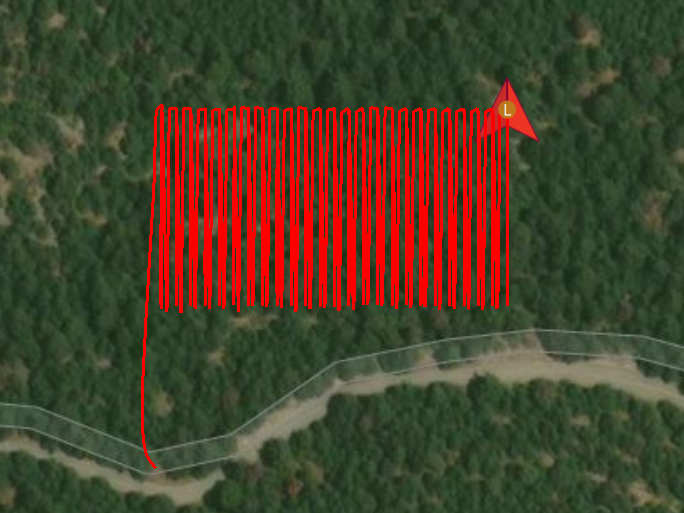
- Highly performant and reliable autonomous vehicles designed for the PX4 platform and simulated through a variety of flight tests in Gazebo.
- Through Etherwave’s profound expertise in communication technologies, robust links for control and telemetry will be simulated and implemented for any UAV platform.
- Vehicle control and onboard data dissemination can be established with the flexible ROS2 software libraries.